(图片来源:Lyft)
想象一下:汽车在高速公路上行驶,遇到了另一辆横穿多条车道的汽车。如果要防止碰撞,就必须减速,但是如何控制减速的速率呢?Lyft的自动驾驶原型利用“受人类启发(human-inspired)”的规划方法,以确定减速速率。最初,该公司使用的基准AI模型不考虑障碍物速度,而最新的模型学习人类驾驶,面对高速超车的汽车时会逐渐减速。
Lyft Level 5团队表示,“此种混合方式能根据人类的偏好进行调整,使驾驶体验更舒适、更自然。我们相信,将基于规则的系统、基于学习的系统,以及人类驾驶数据相结合,可以产生全面的系统级解决方案。”
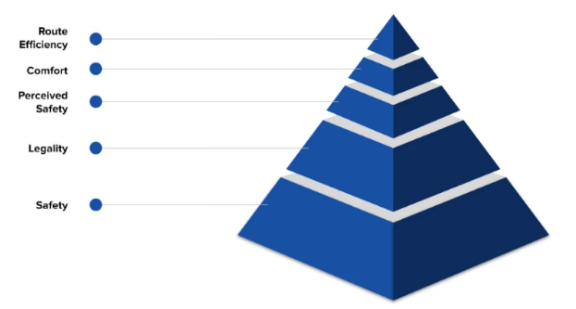
L5工程师们表示,他们从马斯洛的需求层次理论和阿西莫夫的机器人学三定律中获得灵感,进行自动驾驶汽车决策系统架构设计。该金字塔模型的基础是安全性和合法性,即在执行操作之前,Lyft车辆会验证其规划行为是否安全,是否符合当地法律。
此外,该规划模型还考虑了感知安全概念,即使在实际安全风险较低时,也会尽量减少乘客和其他驾驶员的不安全感。在实际驾驶中,可能需要拉大与前车的距离,或者确保自动驾驶汽车不会离车道分隔带过近。该模型的倒数第二层是舒适度,例如减少由于重力导致的恶心。该模型的最顶端是路线效率,例如尽快抵达目的地。
自动驾驶汽车系统透明化将是提高公众接受度的关键。根据去年因特尔委托PSB Research进行的一项调查,尽管约94%的车祸是由人为失误造成的,但是仍然只有21%的美国人愿意将他们的汽车换成自动驾驶汽车,近一半(43%)的人在自动驾驶汽车附近感到不安全。
Lyft自动驾驶发展历程
Lyft Level 5团队由一群数据科学家、应用研究人员、产品经理、运营经理和其他人员组成,致力于为拼车服务构建自动驾驶系统。自2017年7月成立以来,该部门开发了新的3D分割框架、评估车辆能效的新方法,以及使用众包地图追踪车辆移动的技术。
今年早些时候,Lyft在加州帕洛阿尔托(Palo Alto)Level 5总部附近,开设了新的道路测试站点。工程师们将在该中心模拟真实驾驶场景,包括十字路口、红绿灯、道路合并、行人通道和其他公共道路条件,而且其中的组件将可重置。
一年前,Lyft在帕洛阿尔托扩大其员工自动驾驶服务范围,配备人类安全驾驶员的自动驾驶车辆在限定区域内行驶。今年该公司表示,可行驶路线增加了三倍,并计划迅速扩大该项服务的覆盖区域。

 相关文章
相关文章



 精彩导读
精彩导读 热门资讯
热门资讯 关注我们
关注我们
